算法配图拆解
先来个简单点的例子
前面已经介绍了一些A*算法的概念,下面通过一个小例子按步骤拆解下每步所做的事情。
第一步
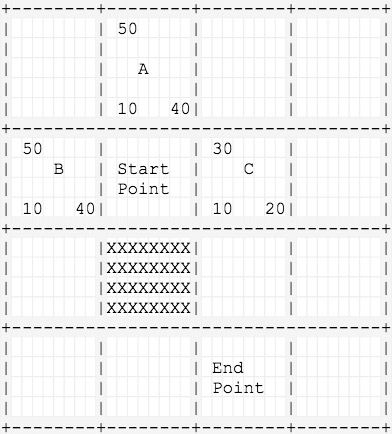
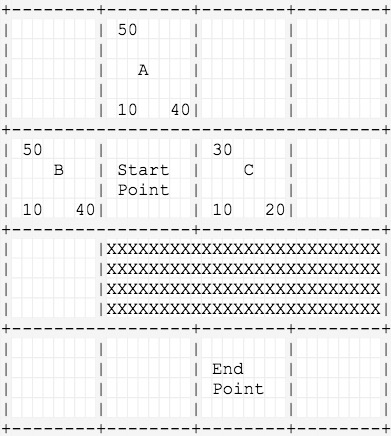
1.将起点Start Point放入开启列表
2.从开放列表取出一个点作为当前节点,将当前节点放入关闭列表
3.遍历当前节点的所有临近节点A、B、C,计算三个节点的F、G、H三个值,将A、B、C三个节点的父节点记为Start Point,放入开启列表(本次不考虑斜对角)
PS.H的计算采用的是曼哈顿距离
第二步
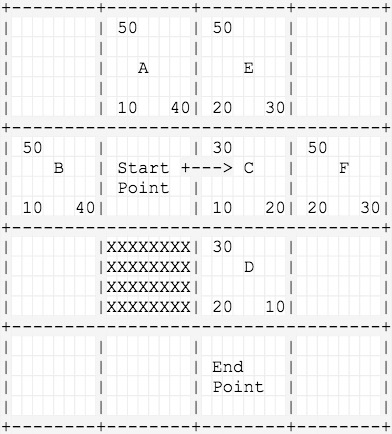
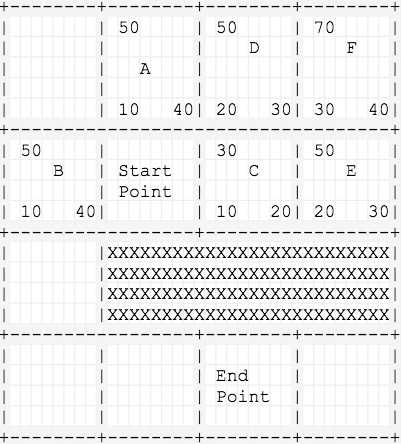
4.从开启列表中弹出一个F值最低的节点:C(记得之前介绍的,A*算法将每次检测具有最小F值的节点),放入关闭列表
5.找到C的所有临近节点:D、E、F,其中Start Point已经在关闭列表,因此不考虑
6.D、E、F的G值计算:G = current.g + g(n) = 10 + 10 = 20,将D、E、F三个节点的父节点标记为C并且放入开启列表
第三步
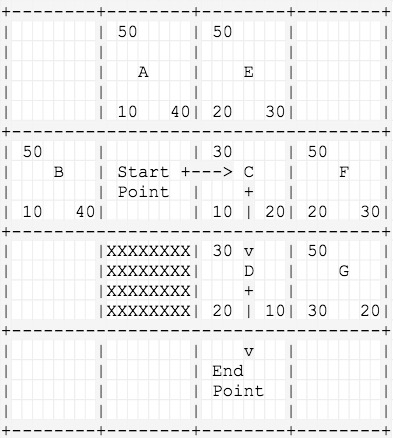
7.从开启列表中弹出一个F值最低的节点:D,放入关闭列表
8.在D的临近节点中发现了终点,循环结束,按节点的parent返回追溯节点链,即为寻路路径
再来一个稍微绕路的
之前那张图上只有一个障碍物,只需要三步就发现了终点,比较顺利,这次的图会利用启发式函数的取值制造一个小陷阱。如图所示,C点下面是障碍物,无法继续向下走的,势必只能从起点向左绕路走。下面来看下A*是怎么绕路的。
第一步
1.还是取出F值最小的C点,将其周围节点放入开启列表,分别是D点和E点
2.将这两个点的F、G、H三个值计算出来,父节点标记为C点,C点放入关闭列表

第二步
3.从开启列表取出一个F值最小的点,但是这时候可以看到,F值最低的为50的点有四个,随便去一个好了,那么就取E点
4.找出E的临近节点F点,计算出F、G、H值标记父节点为E点,E点放入关闭列表,F点放入开启列表,开启列表不为空 & 没找到终点,循环继续
第三步
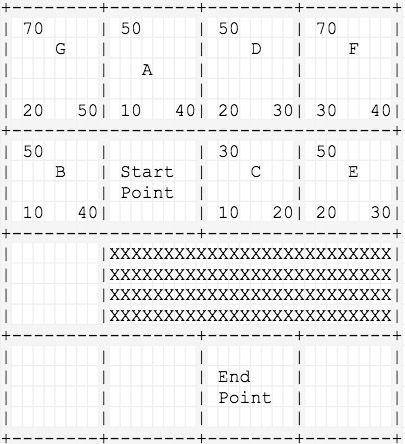
5.可以继续看上一张图,取F值最小的点,就取D点好了,扫描发现D的临近节点A点、F点已经在开启列表了,C点已经在关闭列表
6.此时,对于已经在开启列表的临近节点A点和F点,计算g = D.G + g(D->A)/g(D->F) = 20 + 10 =30,判断变量g是否小于A.G或者F.G
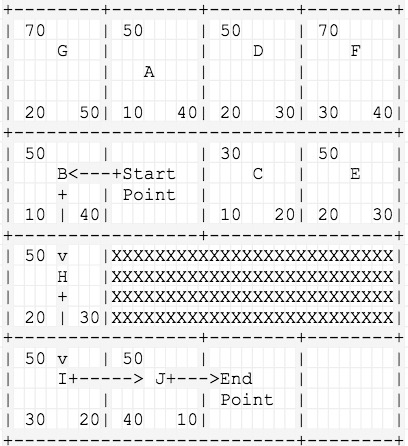
PS.对于已经在开启列表中的临近节点进行G值判断是很重要的一件事,我们用下面的灵魂画作来说明下。
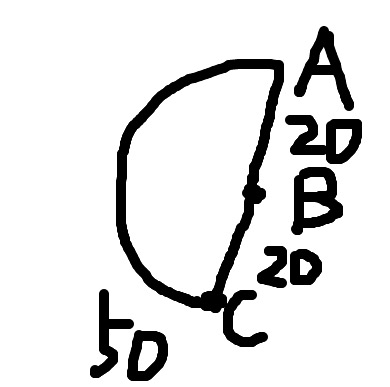
图上A、B、C三个点,从A点开始临近节点时B点和C点,g(A->C) = 50,g(A->B) = 20,g(B->C) = 20
此时从开启列表取出B点,发现B的临近节点C已经在开启列表中了,但是g = B.G + g(B->C) = 20 + 20 =40 < C.G
因此我们会把C的parent指向B点而不是A点,表示从A点过B点到C点的代价更低。
根据G值调整父节点指向是```A*```两个关键步骤之一
另一个关键步骤是:每次从开启列表都弹出一个F值最小的节点,这个步骤就确保了,每次都去尝试移动距离最低的点。
我之前在看```A*```的时候的自我总结:
G用来调整节点的选择,H用来确保始终朝向相对优的方向前进,F就是一个综合策略值,保证能够得出一个相对最优解。
第四步
7.从开启列表取出A点,A点的临近节点只有G点了,计算G点的F、G、H值,标记父节点为A点,A点放入关闭列表
第五步
8.现在开启列表中F值最小的就是B点了,我们可以看到其实兜了一圈还是最终找到了这个正确的节点
9.从B点开始看临近节点,H、I、J三个节点的F值都是50,所以从开启列表中会依次弹出这三个节点,直到在J点的临近节点找到终点
10.我们可以看到,在绕过了刚开始的一段弯路之后,其实从B点开始寻找的路径就非常快乐,这是H值发挥了作用
11.最后一步就是在发现了终点后,反向查询节点的父节点,就能得到寻路路径了